Fibrerised Artificial Muscle to Advance Soft Robotics
Synopsis
This invention features fibrerised artificial muscles with integrated sensors and actuators, enhancing flexibility, mobility, and adaptability in soft robotics. Applications range from navigating confined spaces and delicate manipulation to biomedical uses like prosthetics, overcoming the limitations of traditional rigid robots.
Opportunity
This invention introduces fibrerised artificial muscle with embedded sensors and actuator functions within the fibre or fibre bundle itself. These spiral fibres act as the “muscle” for new soft body robots.
By contracting or expanding in response to external stimuli, these artificial muscles mimic the behaviour of natural muscles. Integrating these robot muscles into the design of soft robotics leads to advancements such as enhanced flexibility, mobility and adaptability.
This innovation promises the development of a new generation of robots capable of excelling in tasks where traditional rigid robots face limitations.
Technology
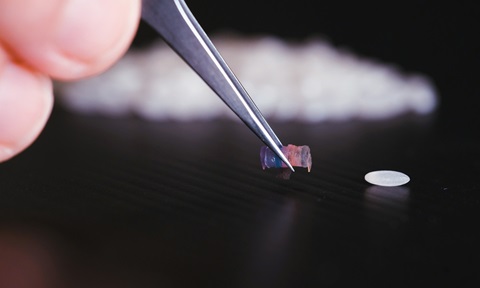
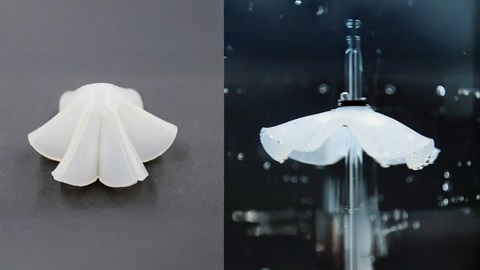
This technology achieves a platform demonstration for the large-scale manufacturing of artificial muscle fibres using a wide range of functional materials responsive to various stimuli. It integrates multiple sensing functions, including torque sensors for proprioceptive load sensing and sensors for force, temperature and pressure. These fibre-based artificial muscles exhibit fast responses, achieving high load-to-weight ratios, a capability that makes them ideal for handling soft materials and serving as durable soft grippers in advanced manufacturing.

Figure 1: Soft grippers for advanced manufacturing.
Applications & Advantages
Applications
- Soft robotics
Advantages
- Soft robots using fibrerised artificial muscles exhibit more natural movements and greater flexibility than traditional rigid robots, enabling effective navigation of complex and confined spaces.
- These artificial muscles allow for precise and adaptable movements, making the robots suitable for tasks requiring delicate manipulation or interaction with varied environments.
- Soft robots using these artificial muscles are safer for interactions with humans due to their compliant and flexible nature, reducing the risk of injury during contact. This makes them suitable for applications in close proximity to people.
- The design flexibility of artificial muscles allows for creating soft robots with varying stiffness and strength levels, enabling performance in a wide range of tasks, from gentle object manipulation to more robust activities.
- The compliant and biomimetic nature of these robots makes them suitable for biomedical applications, such as prosthetics or devices needing gentle interaction with the human body.
.tmb-listing.jpg?Culture=en&sfvrsn=57e7d9a3_1)