A Force Sensor for Tendon-Sheath Driven Mechanism and Tendon Driven Mechanism
Synopsis
The global surgical robotics market is estimated at USD 3.92 billion in 2023, projected to grow at a CAGR of 9.5% from 2024 to 2030. The shortage of physicians and surgeons is driving the adoption of automated surgical instruments. This invention introduces a novel tendon-sheath driven robotic mechanism with integrated Fiber Bragg Grating (FBG) sensors, enhancing precise force measurement and advancing the field of surgical robotics. The global surgical robotics market is estimated at USD 3.92 billion in 2023, projected to grow at a CAGR of 9.5% from 2024 to 2030. The shortage of physicians and surgeons is driving the adoption of automated surgical instruments. This invention introduces a novel tendon-sheath driven robotic mechanism with integrated Fiber Bragg Grating (FBG) sensors, enhancing precise force measurement and advancing the field of surgical robotics.
Opportunity
The global surgical robotics market size was estimated at USD 3.92 billion in 2023 and is expected to grow at a compound annual growth rate (CAGR) of 9.5% from 2024 to 2030. The shortage of physicians and surgeons worldwide and the rising adoption of automated instruments are major factors driving market growth. Precise distal force sensing in flexible surgical robotics, such as robotic endoscopy, is important as it provides surgeons with feedback on the forces acting on the manipulator. Existing force sensors, such as strain gauges, are bulky and unsuitable for flexible surgical applications. This underscores the need for a better solution.
Technology
This invention introduces a tendon-sheath driven robotic mechanism with integrated force-sensing capabilities using FBG sensors. The FBG sensor is housed in a tubular form within the sheath, allowing the tendon to pass through it. This design enables the detection of compressive forces resulting from the manipulator's actions, surpassing conventional methods where FBG sensors are directly affixed to the tendon.
The operational principles and effectiveness of this technology have been validated through modelling and experimental tests. Integrating FBG sensors within the tendon sheath enhances the accuracy and reliability, while the detection of compressive forces enables precise force measurement in the manipulator.
This innovation represents a pivotal sub-assembly for precise force measurement within flexible tendon-driven robotic systems, with applications in surgical robotics and beyond.
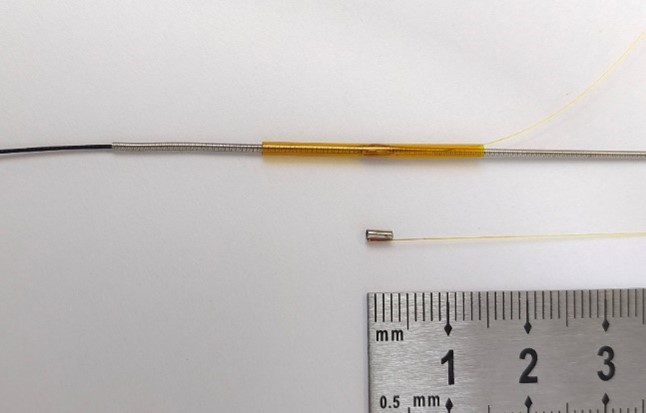
Figure 1: Force sensor prototypes - standalone and sheath-integrated versions.
Applications & Advantages
Main application areas include surgical robotics and robotic endoscopy.
Advantages:
- Avoidance of force decoupling
- Reduced design complexity
- Can be easily replaced
-and-dr-dorrain-low-from-ntu-singapore's-lkcmedicine.tmb-listing.jpg?Culture=en&sfvrsn=b389b500_1)
.tmb-listing.jpg?Culture=en&sfvrsn=82921582_1)

.tmb-listing.jpg?Culture=en&sfvrsn=ba129532_1)