MAE students emerge first at PSA Box Challenge
The objective of the PSA Box Challenge was to design and build a delivery vehicle to transport and stack miniature 300-gram containers around a model yard. In the initial phase of the competition, the team pitched their idea to a panel of judges and were among the 8 teams shortlisted for the final phase. In the final phase, they competed with the other teams to load the containers from their yard area to the vessel as fast and accurately as possible. Teams were judged based on the points scored during the competition, innovation and creativity of design, build quality of machine and user interface.
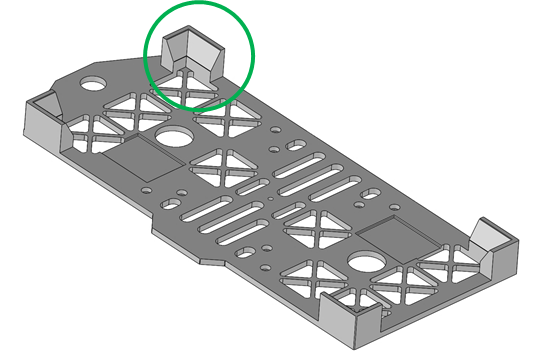
The MAE team decided to build a quadcopter instead of a ground robot because it will be able to get from the yard area to the vessel more quickly. they had to make sure that the downwash generated by the drone does not blow containers away. To do so, they kept their drone relatively light at around 1.3 kg. The team also had to improve upon their earlier design by extending the motor arms to place the 4 motors further apart to spread the downwash out over a larger area, effectively reducing the downwash experienced by the container below the drone. Most of the main frame is 3D printed, while the motor arms are made from carbon fiber rods to ensure stiffness.

The gripper mechanism is based on the concept of magnetic shielding. In the "hold" position, the permanent magnets are able to attract the containers. To release a container, the servo rotates to move the magnets directly above the steel plates, effectively cutting the magnetic field. Compared to electromagnets, this mechanism consumes less power because power is only needed when switching between the hold and release modes.
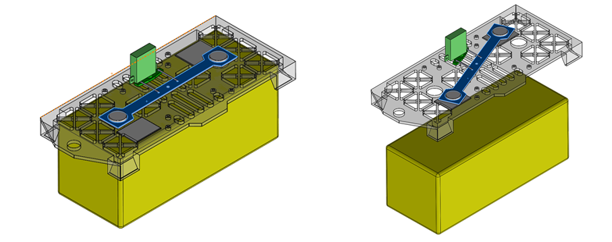
To make it easier for the pilot to pick up a container, they have designed guide rails on the bottom plate to facilitate alignment with the container.
Additionally, the team made use of a downward-facing lidar to provide altitude feedback for semi-autonomous altitude control, making it much easier for a beginner pilot to fly.

Lesson Learnt
“From this challenge, we learnt more about some of the factors to consider when designing and building a drone, as well as how the sensors and flight controller work together. We also learnt about the importance of having team members with different skills. We had different team members focusing on different aspects of the project, such as the drone design, software, user interface, and presentation brochure. However, we did not have an experienced drone pilot in our team. Nevertheless, after days of intense pilot training, Wilson improved his drone flying skills greatly and is now an experienced pilot!
Last but not least, we also learnt about the importance of grit and perseverance. We were presented with many challenges and setbacks throughout our journey. For example, the night before the competition, our servo broke down and we did not have any spare servo. Although it seemed like Murphy's Law was working overtime on us, we tried to keep a positive mindset and focused on solving the problem. Thankfully, we were able to get another servo and worked past midnight to replace it. “